4D Microscopy
Microscopie 4D
- L’objectif de la microscopie 4D développée au laboratoire est la mesure et la caractérisation des structures microscopiques en mouvement (MEMS, nanotechnologies, procédés de gravure, attaques chimiques…) en utilisant la technique de la microscopie interférométrique. Notre approche est de balayer en continu les franges d’interférence sur toute la profondeur de la surface à mesurer, d’acquérir les images avec une caméra rapide et d’effectuer un traitement d’images fortement parallélisé en logique câblée pour mesurer la hauteur du relief de la surface (voir l’onglet « Principe »). Cette approche nous permet de réaliser des mesures apériodiques, aussi bien que périodiques.
Le projet CAM 4D
- Au cours des dix dernières années, le laboratoire a acquis une forte expérience dans le domaine de la métrologie interférométrique.
- Le premier prototype de système 4D a été financé par un projet ACO-CNRS ("La microscopie optique 3D en temps réel à très haute résolution spatiale") et le projet EU INTERREG III, où nous avons réussi à effectuer des mesures en temps réel à une cadence de 6 images 3D par seconde sur une profondeur de rugosité de quelques microns [Dubois et al. 2002 et Montgomery et al. 2003]. Ces résultats ont été une première au niveau mondial à notre connaissance, tant au niveau de la cadence de mesure que pour la profondeur d’analyse. La caméra rapide CCD permettait une acquisition de 250 images/s (512x512 pixels) et le traitement était effectué sur une carte FPGA ("Field Programmable Gate Array").
- Grâce au Projet CAM4D financé par Oséo, nous avons développé un deuxième prototype autour d’une caméra rapide CMOS (500 i/s en plein champ, 16000 i/s en talle réduite) avec des performances accrues. Le système de microscopie interférométrique CAM 4D est un prototype « pré-industriel » de visualisation et de métrologie optique dans le domaine de la profilométrie 4D (3D + temps) en temps réel. Autrement dit, c’est un système de mesure et de caractérisation 4D d’objets microscopiques en mouvement.
Le banc de mesure

- Système de microscopie CAM 4D
- La figure ci-dessous montre le schéma du système CAM 4D.

- Fig. 1: Schéma du système de microscopie 4D
- Ce prototype peut être décomposé en deux parties. Une première partie, optique, est constituée d’un microscope Leica DMRX équipé d’objectifs interférométriques (Michelson ou Mirau), d’une source de lumière, d’une caméra rapide numérique et d’un module de translation verticale piézoélectrique avec une dynamique de 100 µm. Une série de franges peut alors être observée dans le détecteur de la caméra montrant les variations de contraste au niveau de chaque pixel. Une seconde partie, électronique/informatique, est constituée d’une carte d’acquisition (dotée d’un FPGA Virtex 2P de Xilinx et de mémoires SRAM et DDR) et d’un ordinateur. Elle sert à contrôler les différents systèmes de translation et à assurer l’acquisition, le stockage et le traitement des données d’interférence issues de la partie optique. L’ensemble des composants doit être soigneusement synchronisé afin que le système puisse fonctionner correctement.
- Le dispositif est posé sur une table anti-vibration (SmartTable de NewPort) équipée d’un système de compensation actif qui limite les vibrations résiduelles du banc optique.
- Le principe de fonctionnement du système CAM 4D est le suivant : la surface de l’échantillon à analyser est balayée sur toute sa profondeur par une sonde virtuelle au moyen d’un translateur vertical piézoélectrique. Les images ainsi formées sont envoyées, via une liaison « CameraLink », vers la carte d’acquisition et sont traitées dans le FPGA, où les informations d’altitude (3D) sont extraites. Les résultats sont ensuite envoyés vers le PC, où ils sont visualisés et analysés. Ce système a l’avantage d’une grande souplesse en terme de choix de taille d’images, de cadence d’acquisition, de profondeur de mesure et de type d’algorithme employé.
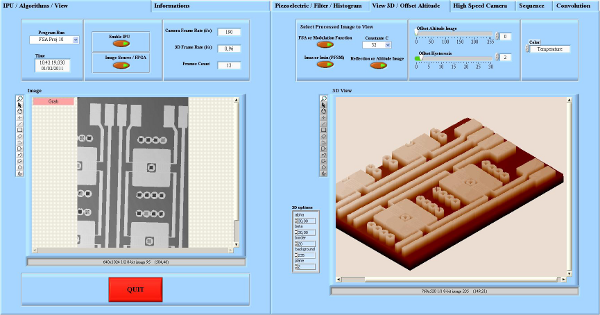
- Les logiciels de contrôle du système, de visualisation, de sauvegarde et d’analyse des résultats ont été développés sous l’environnement de développement graphique LabView (Laboratory Virtual Instrumentation Engineering Workbench). La figure ci-dessous donne un aperçu du logiciel de visualisation des résultats en 3D temps réel.

- Fig. 2: Logiciel de visualisation des résultats du système CAM 4D
Les algorithmes
- Nous avons choisi d’implanter les techniques d’analyse en lumière blanche dans notre banc de mesure 4D afin de garantir une grande dynamique de mesure. En effet, certaines techniques utilisées en lumière blanche ne nécessitent que l’utilisation d’opérateurs basiques tels que les comparateurs, les additionneurs, les multiplexeurs, les multiplieurs, facilement implementables sur cible matérielle telle qu’un FPGA.
t
- Deux algorithmes d’extraction d’images 3D en temps réel ont été développés en VHDL (Very High speed integrated circuit hardware Description Language) et implémentés dans le FPGA : la PFSM (Peak Fringe Scanning Microscopy) et la FSA (Five-Sample-Adaptive non linear algorithm).
PFSM
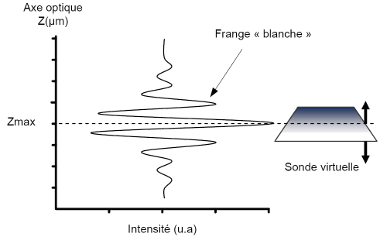
- La PFSM est un algorithme très simple qui consiste à détecter directement le pic sur la frange d’interférence. L’idée principale de cette méthode est d’utiliser la frange centrale d’ordre zéro (figure 3), caractérisée par le contraste le plus élevé, comme un plan sonde virtuel. Cette sonde virtuelle est ensuite utilisée pour détecter la valeur la plus grande de l’intensité de chaque pixel lors du balayage vertical de l’échantillon. Une image complète de la structure tridimensionnelle de l’échantillon est ainsi créée. Pour une profondeur de balayage verticale donnée, plus petit est le pas d’échantillonnage et meilleure sera sa résolution axiale au détriment de la quantité d’information à traiter.

- Fig. 3: Méthode de détection du pic de la frange d’interférence par la PFSM
- Le traitement consiste à rechercher à chaque pas le maximum d’intensité pour chaque pixel. Elle est bien adaptée au temps réel car elle a l’avantage d’être utilisable pendant l’acquisition des images. Cependant, le fond continu, qui varie très peu, ne doit pas présenter de variations d’intensités supérieures à l’amplitude maximale des franges.
FSA
- La FSA est un algorithme qui consiste à mesurer l’enveloppe (visibilité) des franges à partir d’une fenêtre glissante de 5 images consécutives et déphasées de 90° suivant la relation :
où C est une constante de normalisation. Le pic de l’enveloppe de la visibilité donne la position sur Z à chaque pixel.
- Cette relation permet, dans un premier temps, d’extraire l’enveloppe des franges d’interférence à partir de 5 mesures prises le long de l’axe Z (figure 4.a) et au fur et à mesure que le balayage vertical évolue, on construit progressivement l’enveloppe des franges pour chaque pixel. L’étape suivante consiste à détecter le pic l’enveloppe pour chaque pixel (figure 4.b).
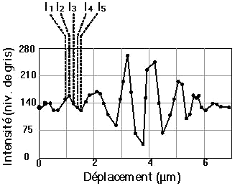
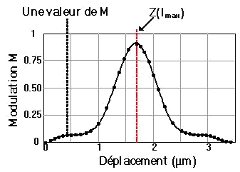
- Fig. 4: Méthode de détection du pic de la frange d’interférence par la FSA
Comparaison :
- La PFSM a une résolution verticale qui dépend du pas de déplacement de la table piézoélectrique ; plus ce pas est petit et meilleure sera sa résolution. Cependant, la réduction du pas d’échantillonnage entraîne une augmentation de la quantité de données à traiter. La technique de la FSA quant à elle exige que le déphasage entre 2 franges consécutives soit fixe et égal à 90°, ce qui impose un pas de balayage en Z connu et constant (environ 76 nm correspondant à λ/8, avec λ = 610 nm). La résolution de la FSA peut être améliorée, par exemple, par l’interpolation (moindres carrés) d’une gaussienne symétrique et adaptée dans le voisinage du pic de l’enveloppe. La FSA a l’avantage d’être moins sensible aux bruits hautes fréquences puisque celles-ci sont éliminées pendant la phase de construction de l’enveloppe. La FSA permet aussi d’éliminer le fond continu.
Résultats et performances
- Une mesure de grande taille (640 x 1024 pixels) "on-line" en utilisant l’algorithme de la PFSM est présentée ci-dessous, montrant le déplacement latéral d’une sonde microfluxgate (sonde magnétique intégrée). La mesure a été effectuée à une cadence de 1,9 images 3D par seconde sur une profondeur de 5 µm avec une résolution axiale de 40 nm. En diminuant la taille de l’image, la cadence de mesure peut être augmentée.
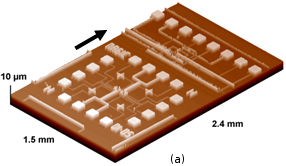
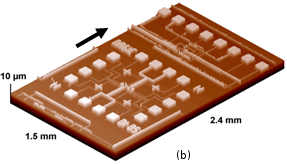
- Fig. 6: Déplacement de la sonde ; (a) I0 : t = 0 s ; dx = 0 µm, (b) I8 : t = 8/1,9 = 4,21 s ; dx = 36 pixels = 84,6 µm
- Nous avons déplacé l’échantillon à l’aide d’une platine motorisée XY de précision. La vitesse de déplacement nominale de la platine est de 20 µm/s. Dans la figure 5, la sonde s’est déplacée de 84,6 µm (mesuré avec notre logiciel de profilométrie) sur un temps comprenant 8 images 3D, ce qui correspond à 4,21 secondes puisque la cadence de mesure 3D est de 1,9 images par seconde. On arrive alors à une vitesse de déplacement de la platine de 84,6/4,21 = 20,1 µm/s, ce qui correspond à la vitesse nominale.
- La mesure quantitative du relief de l’échantillon est une autre information fournie par les images d’altitude. La figure 6 montre le profil de la sonde magnétique intégrée. On observe que la profondeur mesurée est de 3,22 µm.

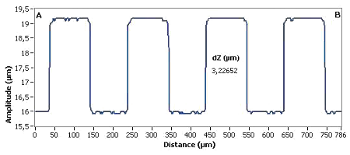
- Fig. 6: Mesure du profil de la sonde magnétique
- Des mesures en temps réel ont pu être réalisées au laboratoire et ont permis de valider le fonctionnement des algorithmes de la PFSM et de la FSA et les performances du système (figure 7). Les cadences de mesure d’images 3D sont données en fonction de la profondeur mesurée pour différentes tailles d’image. Ainsi, pour une image de 640 x 1024 pixels, il est possible d’atteindre une cadence 3D de mesure de quelques images par seconde. Avec une réduction de la taille d’image à 320 x 256 pixels, par exemple, la cadence 3D de mesure peut être augmentée à une vingtaine d’images par seconde. La résolution de la FSA doit être de 76 nm, mais le pas de la PFSM peut varier. Si le pas de la PFSM est augmenté, alors la cadence d’images 3D est elle aussi augmentée. En contrepartie, plus le pas de la PFSM est petit et meilleure sera sa résolution axiale.

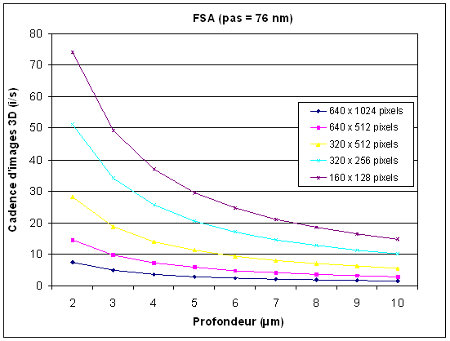
- Fig. 7: Les performances du système de mesure en temps réel
Les avantages du système CAM 4D
Le système de mesure 4D temps réel de l’InESS a l’avantage d’avoir une grande souplesse en termes de choix de taille d’images (les grandes tailles sont possibles), de cadence d’acquisition (caméra rapide pouvant monter à très haute cadence), de profondeur de mesure et de type d’algorithme employé (PFSM ou FSA). La microscopie par interférométrie 4D telle que développée à l’InESS comporte principalement trois avantages par rapport à la microscopie classique 3D. Le premier est qu’elle permet d’analyser un échantillon plus rapidement qu’en 3D classique. Le second, qui est le plus important, est qu’elle permet de visualiser et de quantifier des changements de surface en temps réel. Le troisième est que ceci est possible sur de grandes profondeurs d’analyse.
- Les points forts du système CAM 4D sont énumérés ci-dessous :
- Souplesse
- Choix de la taille de la surface à analyser (possibilité de grandes tailles) ;
- Choix de la cadence d’acquisition ;
- Choix de la profondeur de mesure ;
- Choix de l’algorithme à appliquer
- Algorithmes évolutifs : implémentés en logique câblée (FPGA) reprogrammable ;
- Logiciel de gestion modulaire du banc de mesure : développé sous LabView ;
- Logiciel de gestion modulaire du banc de mesure
- Banc constitué de composants standards (microscope, caméra rapide, carte de traitement, etc) ;
- Possibilité de déplacer soit l’objectif interférentiel ou soit l’échantillon ;
- Mesures 3D en temps réel enregistrables ;
- Mesure et caractérisation de structures microscopiques en mouvement périodique ou apériodique ;
- Cette technologie et principalement ces avantages ouvrent donc la voie vers de nouvelles applications.